Défi Robot Lego EV3 n°5 : Le radar tronçon
Activité produite dans le cadre des travaux académiques mutualisés 2015-2016.
Auteur : Stéphane Senlis
Présentation de l’activité
Les élèves doivent concevoir un radar tronçon pour pouvoir comparer les performances de maquettes construites en technologie.
Public
Collège ( cycle 4 )
Objectifs
- étudier le fonctionnement d’un radar
- utiliser un chronomètre dans le logiciel EV3
- programmer des calculs et afficher les résultats sur l’écran de la brique
- utiliser la relation entre la vitesse moyenne, la distance parcourue et le temps
- décomposer une figure complexe en figures plus simples
- utiliser le théorème de Pythagore, le théorème de Thalès, la trigonométrie.
Déroulement
On peut commencer par une recherche sur les types de radars routiers puis réfléchir aux capteurs qui peuvent être utilisés avec le robot EV3.
Voici deux versions qui utilisent les capteurs à ultra-sons. Seule la version 1 a été programmée par les élèves qui ont testé cette activité. La version 2 (simplifiée) a été envisagée par les élèves mais non programmée. Et en ce qui concerne la version 2 (complète), je l’ai évoquée avec les élèves mais ils ne l’ont pas étudiée.
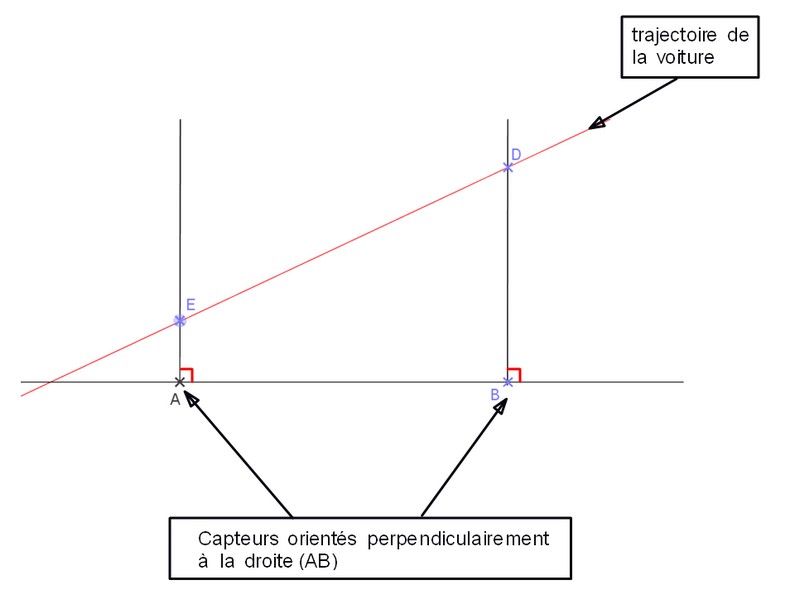
1ère version : déplacement parallèle à la droite reliant les capteurs à ultra-sons
Décomposition géométrique proposée :
Remarque : La longueur AB est mesurée lors de l’installation des capteurs.
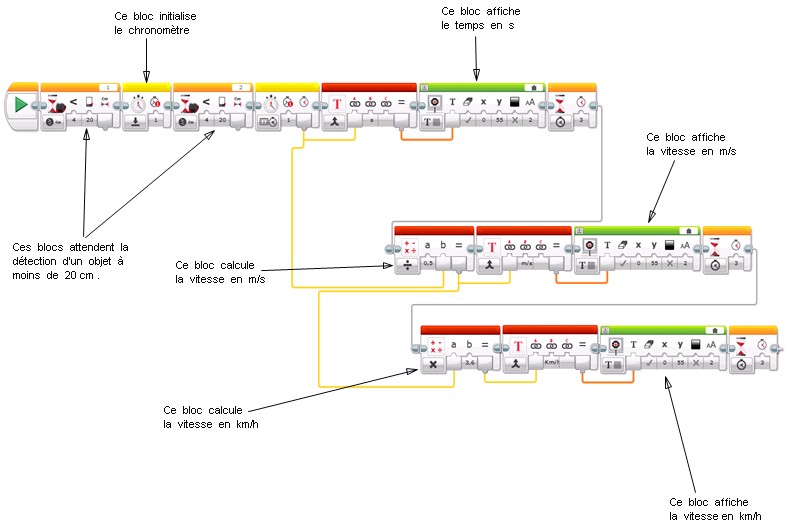
Exemple de programmation (élève) :
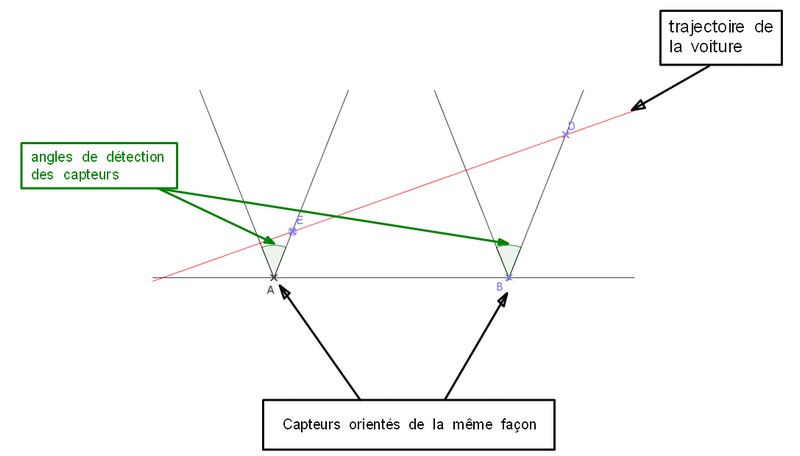
2ème version : déplacement non parallèle à la droite reliant les capteurs à ultra-sons
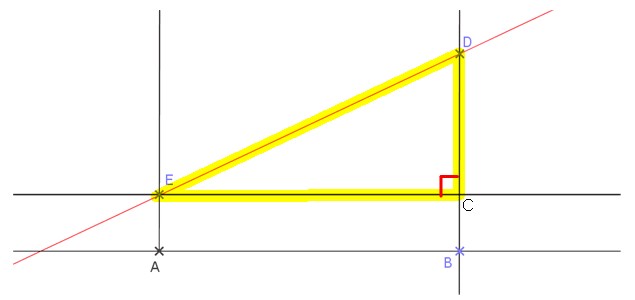
Problème simplifié (on suppose les capteurs unidirectionnels) :
Remarque : La longueur AB est mesurée lors de l’installation des capteurs.
Décomposition proposée :
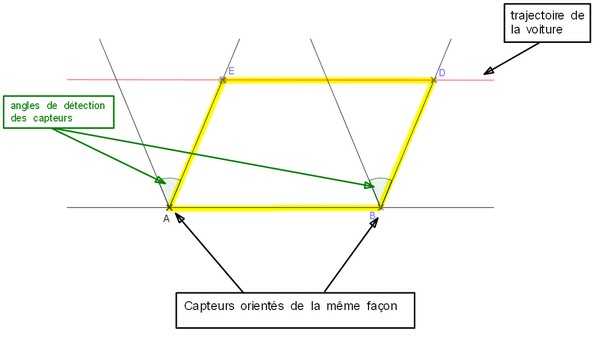
Problème « complet » :
Décomposition de la figure :
Remarque : La longueur AB et les angles codés en rouge sont mesurés lors de l’installation des capteurs.
Variantes (ou pour aller plus loin)
- utiliser des capteurs tactiles
- étudier d’autres types de radars (avec un seul capteur sur une ligne droite ou sur une piste fermée)
- possibilité de travailler avec deux briques qui s’envoient des messages
- effet Doppler et radar (http://kezako.unisciel.fr/kezako-comment-fonctionnent-les-radars-de-controle-de-vitesse/)
Fichiers utiles
-
format PDF - 464.6 kio