Défi Robot Lego EV3 n°4 : Tracer une figure
Cycle 4 ; Robotique
Activité produite dans le cadre des travaux académiques mutualisés 2015-2016.
Auteur : Stéphane Senlis
Présentation de l’activité
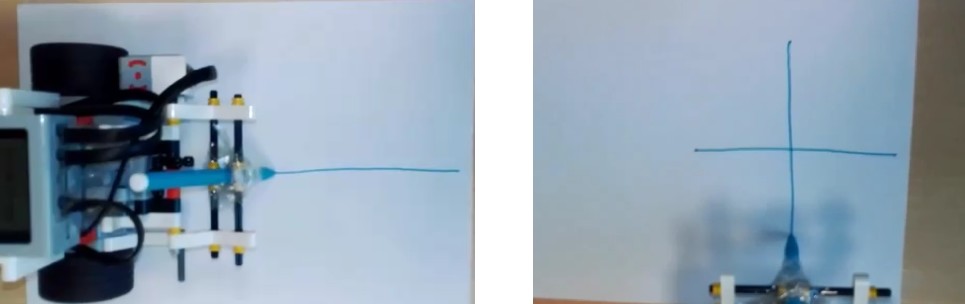
Il s’agit de programmer le robot pour qu’il trace une figure.
Public
Collège ( cycle 4 )
Séance préalable
Découverte du logiciel EV3 éducation, découverte d’un logiciel de montage vidéo.
Objectifs
- Utiliser le capteur gyroscopique (non obligatoire)
- Observer, décrire, « comprendre » une figure (milieu, angle droit, symétrie, médiatrice)
- Comprendre et visualiser les déplacements du robot
Déroulement
Cette activité a été testée avec des élèves de 3ème (en demi-classe). Les élèves ont travaillé par groupes de trois. Le travail a duré environ 5h.
Nous avons travaillé à partir d’une vidéo (voir vidéo_roro en fin d’article) et j’ai demandé aux élèves d’essayer de faire une figure avec les mêmes propriétés. J’ai ajouté une contrainte : la figure devait tenir sur une feuille A4 ou A3.
Bilan
- les élèves ont pensé à décomposer le problème
- j’ai demandé à chaque groupe de décrire la figure oralement pour préciser ses propriétés
- nous avons étudié l’intérêt du capteur gyroscopique (stratégie sans capteur ou avec capteur selon les groupes)
- une des difficultés pour les élèves a été de comprendre les déplacements du robot et du crayon puis d’adapter les réglages. Lors des réglages, les élèves ont utilisé l’affichage des ports sur l’écran du robot et ils ont testé certains déplacements « à la main ». Ils ont également réutilisé les notions du premier défi (contournement de la poubelle).
- pour corriger ce défi , nous avons commenté la proposition ci-dessous :
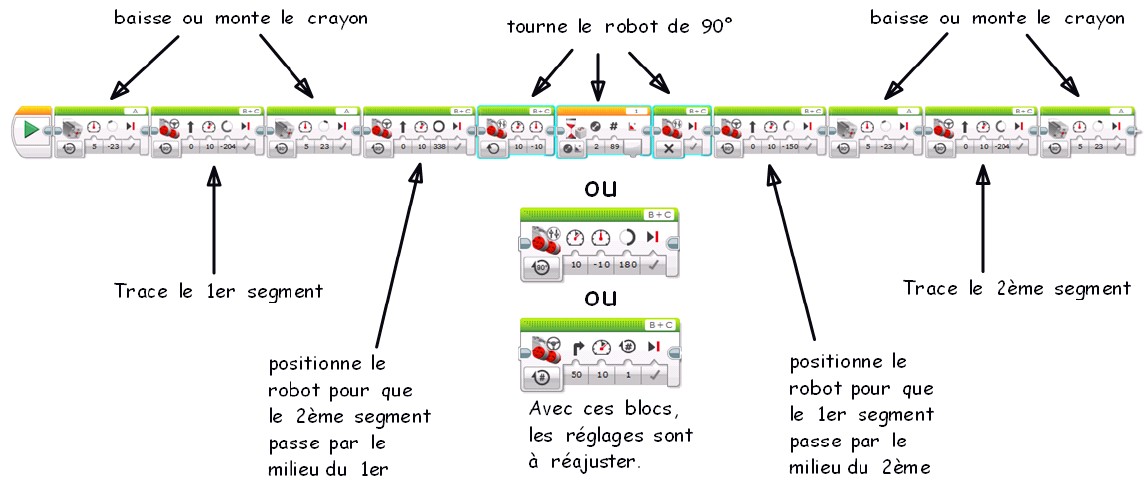
-
format Windows Media Video - 21 Mio
Variantes (ou pour aller plus loin)
- faire construire une autre figure
- utiliser un autre langage de programmation
- utiliser un autre robot
Fichiers utiles
-
format PDF - 617.1 kio
Mise à jour : 10 avril 2018